Wow, que bien suena esto de tener un espacio para videojuegos aquí, en Stratos no me deja crear un nuevo mensaje y es que llevo un par de años (en ratos libres eh sino ya habría desistido) intentando solucionar este problema, y es que tengo un modelo bastante grande de una ciudad y el motor que uso no soporta nada de árboles binarios, así que, me lo tengo que trabajar de alguna manera, las texturas también son grandes, porque necesito que tenga mucho detalle.
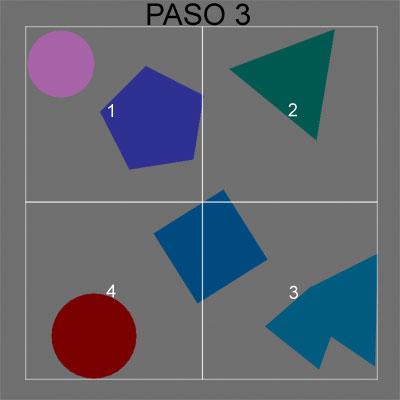
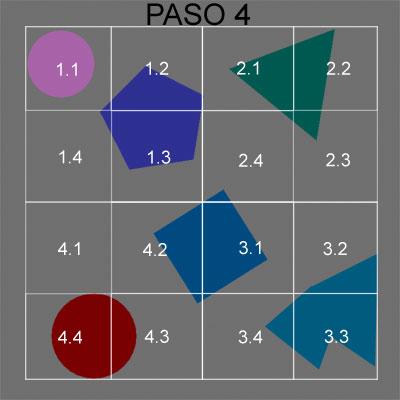
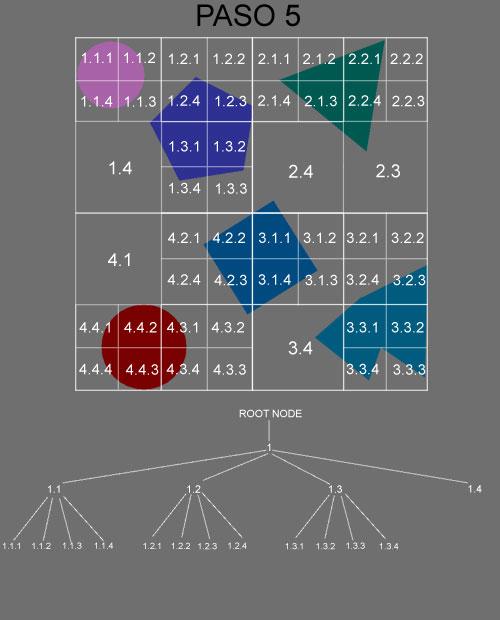
El caso que no consigo entender del todo los bsptres que era mi idea, así que, me las estoy ingeniando de alguna manera para cargar el mapa x sectores, pero sigo muy perdió, ahora lo tengo que cargue cada manzana si entra en el rango de visión de la cámara, pero entra dentro cada manzana individualmente (es decir, que al estar exportado cada manzana en un archivo independiente pues solo comprueba esa manzana, y si tiene alguna manzana x delante no la tiene en cuenta, con lo cual todas las manzanas que estén delante de mis narices, las carga, no me vale está solución, tengo algunas funciones para comprobar las intersecciones de linea-plano, pero me resulta algo complicado pami), el caso que también tenía pensado que cargue cada manzana (estoy pensando en exportar x fachadas, en vez x manzanas, pero esto va a ser muy engorroso de exportar, ya que manzanas son unas 30, y si le ponemos 50 fachadas x manzana, son 1500 manzanas, y una a una exportando es un coñazo, y como tenga que cambiar algo, esta es mi última posibilidad, cuando cargo el modelo, lo cargo sin textura para que sea más rápido, y las voy cargando en tiempo de ejecución, pero sigo muy perdió, no sé muy bien cómo hacerlo, si alguien sabe cómo solucionar mi problema estaría muy agradesio y sino pues lo tendré que hacer x fachadas.
Gracias anticip? S y saludos.
×
 Lo primero
+ Preguntar sobre
Lo primero
+ Preguntar sobre
Configuración
Mi perfil
Contacto
Mail al administrador
- Animación y Rigging
- Errores de programa
- Hardware
- Iluminación
- Impresoras 3D
- Modelado
- Partículas y Dinámicas
- Plugins
- Postproducción
- Render y Cámaras
- Script
- Texturas y Materiales
- Videojuegos
Configuración
Mi perfil
Contacto
Mail al administrador

 Citar
Citar