

una de las características que más sorprenden de Blender es el módulo de simulaciones físicas integrado. Cuando enseño a los compañeros de trabajo este grupo de funcionalidades muchos me preguntan: ¿en serio que esto es libre? Efectivamente es libre y puede competir en muchos aspectos con soluciones de simulación física privativas de famosos paquetes de diseño 3d. Las principales propiedades de simulación física se encuentran en el grupo de botones de objeto, en los botones de simulaciones físicas
Figura 01. grupos de pestañas de las opciones de simulación física.
En estos botones se distinguen cuatro grupos de pestañas (ver figura 1), de izquierda a derecha tenemos la primera pestaña collision sirve para especificar que el objeto se tendrá en cuenta en el motor de simulación a la hora de calcular las colisiones. La pestaña de su izquierda Fields sirve para definir campos de energía (como, por ejemplo, viento). El siguiente grupo de pestañas Softbody sirve para añadir cuerpos blandos (semi-rígidos). Las pestaña de collision y Solver agrupadas con Softbody permiten indicar propiedades particulares para ese tipo de objetos. No debe confundirse con la pestaña collision de la izquierda. El grupo de pestañas de Cloth permite crear simulaciones físicas de tela. Finalmente, el grupo fluid permite realizar simulaciones físicas de fluidos. Se podría hacer un curso de más de 100 horas para empezar a sacar el verdadero rendimiento de los motores de simulación física de Blender. En los siguientes apartados nos centraremos en ver algunas de sus capacidades básicas a modo de tutorial y comentaremos algunos de los controles principales.
Bounce, tumble and splash.: para profundizar en el uso de los motores de simulación física, la obra de referencia oficial de Blender es el libro de Tony mullen https://www.foro3d.com/extras/tutoriales/blender/enfoque_blender/simulaciones_files/link.gif[/img]bounce, tumble and splash., publicado por la editorial Sybex (ISBN: 978-0-470-19280-1). En este libro de nivel medio/avanzado se describen en detalle el uso de partículas, cuerpos rígidos y blandos, telas, pelo. (ver más información en latabla de contenidos).
cuerpos blandos (software body).
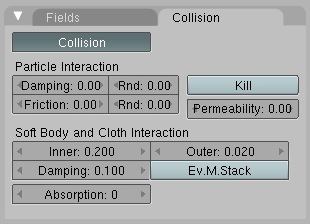
El simulador de cuerpos blandos (o software bodies) permite realizar la simulación de colisiones de cuerpos con cierto grado de elasticidad. Veremos cómo utilizar este módulo para simular también cuerpos rígidos. Los objetos que deban ser tenidos en cuenta a la hora de simular colisiones deberán tener activo el botón collision de la primera pestaña collision de la figura 1. Si el botón esta activo, aparecerán nuevos controles cómo se muestra en la figura 2. En esta pestaña se distinguen dos grupos de opciones, las que se aplicarán a los cuerpos blandos y telas y las que se aplicarán a los sistemas de partículas. Damping es el factor de amortiguacción (si se establece alto, el objeto se comportara como una cama elástica) friction es el factor de fricción con otros cuerpos. Inner y outer controla el volumen que se aplicará a las caras poligonales para simular que tienen volumen y calcular así de forma correcta la colisión.
figura 02. pestaña collision.
La pestaña Softbody (ver figura 3) permite controlar las opciones concretas de este tipo de cuerpos. Algunos parámetros interesantes de esta pestaña son:
figura 03. Softbody.
- friction: factor de fricción (rozamiento) del objeto con el resto. Un valor de 0 hace que no tenga fricción (50 es el máximo).
- mass: masa para los vértices del objeto.
- grav: gravedad (en el eje z). Valores negativos hacen que el objeto salga disparado hacia arriba.
- speed: permite controlar la velocidad de caída del objeto (simulando que es más pesado). Aumentar la masa puede tener efectos de penetración con otros objetos del mundo.
- use goal: si esta activo, permite interactuar con otros elementos animables de la escena (mediante curvas ipo por ejemplo). Requiere definir grupos de vértices. Para los propósitos de esta introducción básica lo dejaremos desactivado.
- use Edges: si esta activo, las aristas del objeto funcionaran como muelles para el simulador de física.
- Stif quads: añade muelles internos en las diagonales de las caras cuadradas. Esto les da mucha mayor consistencia, haciendo que el objeto se comporte como un cuerpo rígido. Lo emplearemos para simular en este módulo este tipo de cuerpos.
- cedge y cface: utiliza las aristas y las caras para calcular internamente las colisiones. Cuidado, puede ser muy lento con modelos complejos. Por lo general funciona con suficiente precisión incluso si se deja desactivado.
- pull, push, damp: valores relacionados con la dureza de los muelles. Valores pequeños significan objetos muy elásticos.
- plas: nivel de plasticidad. Si vale mayor que cero, las deformaciones debidas a los impactos contra otros objetos se vuelven permanentes.
- be: fuerza de curvatura. Parámetro importante para que el cuerpo no se doble por las aristas.
Uso del Game Engine para simular colisiones entre cuerpos rígidos.
Cuerpos rígidos y Game Engine: Blender incorpora además un simulador de cuerpos rígidos que está integrado en el motor de juegos. No esta previsto en un futuro cercano que este motor se integre además en la parte de animación, por lo que es necesario utilizar el grupo de botones de la lógica del Game Engine
Para utilizarlo. Una vez realizada la simulación, se puede guardar en curvas ipo para aplicarlas en el módulo de animación (en el menú principal, game/ récord game physics todo ipo. Queda fuera del alcance de este curso comentar la funcionalidad del Game Engine.
A continuación veremos un ejemplo de uso de softbodies. Crearemos una escena sencilla y modificaremos algunos parámetros para mostrar el efecto que produce sobre la animación resultado. Recordemos que para reproducir la animación se puede realizar mediante el botón
De la ventana
O mediante el atajo de teclado Alt shift a.
Aplicando mallas de mayor resolución y jugando con los parámetros de nivel de rigidez de los muelles se pueden obtener simulaciones de tipo gelatina. La figura 4 muestra algunos fotogramas de una animación realizada aplicando 4 niveles de subdivisión al cubo del video anterior. Queda como ejercicio propuesto al alumno que experimente con los parámetros explicados anteriormente y con diferentes objetos simples (con bajo número de polígonos). El cálculo de la colisión depende de la complejidad del modelo por lo que, para probar opciones lo mejor es emplear objetos con bajo número de vértices.
Figura 04. cubo gelatinoso.
Simulación de telas.
La simulación de telas es muy parecida a la simulación de cuerpos semirígidos que hemos visto anteriormente, pero funciona mejor con mallas abiertas (como planos, por ejemplo), lo cual tiene mucho sentido ya que la ropa normalmente se modela con superficies abiertas. Las opciones de simulación se pueden ver en la figura 5.
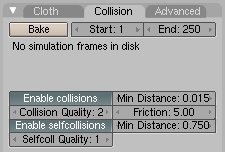
Figura 05. opciones Cloth.
Blender dispone de configuraciones prefijadas de materiales que pueden seleccionarse en la lista desplegable de material preset como cuero ([leather), tela vaquera ([denim), goma ([Rubber), algodón ([Cotton) o seda ([Silk). La calidad de la simulación se establece en el parámetro quality (valores más altos requieren mayor tiempo de cómputo). Aunque requiere más tiempo de cálculo es aconsejable activar el botón enable selfcollisions de la pestaña collision del grupo de pestañas de [Cloth. Este botón, como su nombre indica, calcula las colisiones producidas entre los pliegues de la tela, obteniendo resultados realistas. Como la simulación se realiza a nivel de cara poligonal, es interesante que la malla de la tela tenga resolución suficiente (pero no excesiva, ya que influirá en el tiempo de cómputo de la simulación).
Veamos a continuación algunos ejemplos de uso del simulador de tela. Como se puede ver en el siguiente video, es posible emplear el simulador con otros objetos que tengan la propiedad de collision activa, como el cubo rotando del ejemplo. En
Video: 01:03 se subdivide el plano sobre el que se aplicará el simulador de tela para que tenga polígonos suficientes, como el nivel de subdivisión elegido es bajo, en
Video: 03:32 se aplica de nuevo un nivel más.
Figura 06. pestaña collision.
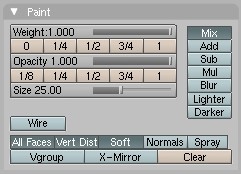
Una funcionalidad avanzada que aún no hemos visto es la capacidad de establecer factores de aplicación de deformaciones mediante pesos. Empleando un código de color, se aplica un factor de aplicabilidad de la deformación a cada vértice del modelo, empleando el modo de pintado de pesos, seleccionable como es habitual en la cabecera de la ventana 3d. Al igual que ocurría con el modo de pintado de vértices o de textura, en este modo aparece una nueva pestaña Paint en los botones de edición
Con las opciones de coloreado (ver figura 7). El color rojo indica un peso a los vértices de 1, y el azul de 0. Valores intermedios de color (entre rojo y azul) implican pesos intermedios.
Figura 07. Paint (pesos).
Activando el botón Pinning of Cloth de la pestaña Cloth (figura 5) Blender tendrá en cuenta el peso de los vértices para establecer la deformación adecuada. De este modo es muy sencillo animar cualquier tela que esté colgada (como banderas, cortinas.) o elementos de tela con los que interactúen los personajes de la escena (por ejeplo, un pañuelo sujeto por una esquina).
En el siguiente video de ejemplo se utiliza esta funcionalidad. Se define que las esquinas del plano tendrán influencia 1 (estarán fijas), estableciendo el parámetro weight de la pestaña Paint a 1
Video: 00:30. Al pintar en la ventana 3d en modo
Los vértices se pintaran de color rojo
Video: 00:33. Al hacer la simulación de nuevo, el plano se caerá al suelo
Video: 00:42 porque no se había activado el botón Pinning of Cloth
Video: 00:48. Hecho esto se añade un campo de fuerza de tipo viento Wind mediante un Empty
Video: 01:03 - 01:10. El eje Z del Empty indica la dirección del viento, por lo que se rota para que apunte a la tela. A continuación se realizan varias pruebas para obtener un valor de fuerza del viento strength adecuando. En la última parte del video
Video: 02:36 - 05:39 se añade un cubo ajustando su animación para que llegue a chocar con la tela. Cabe destacar en
Video: 02:21 se establece un nuevo rango de cálculo de la simulación para la tela (por defecto Blender lo calcula en el intervalo 1-250). Esto se realiza en la pestaña collision de cada grupo de simulación.
Fluidos.
El simulador de fluidos de Blender es una de las características más impresionantes del grupo de botones de simulación. Este módulo crea una malla poligonal para cada frame de la animación. Es un proceso computacionalmente costos o y requiere definir una serie de elementos básicos (ver figura:
- domain: dominio en el que el simulador se ejecutara. Deberá limitar el espacio sobre el que se realizara la simulación. Todo lo que no abarque el objeto que haga de dominio no tendrá efecto sobre la simulación. En el dominio se especifica la resolución de la malla poligonal resultante (campo resolution, a valores altos, mejor precisión, pero mayores tiempos de cómputo y memoria consumida). El tiempo de inicio y de fin de la simulación start time y end time se miden en segundos. Cuando el resto de parámetros está listo, el botón bake permite calcular la simulación.
Figura 08. pestañas de simulación de fluidos.- obstacle: mediante este botón es posible establecer que un objeto actuara como un obstáculo en la simulación. Típicamente los recipientes contenedores del líquido actuaran como obstáculos.
- inflow/outflow: estos dos botones permiten especificar los elementos de la escena que actuaran como productores o consumidores de fluido. En el caso de inflow, será un productor de fluido con la velocidad inicial que se especifique (hay que tener en cuenta que la gravedad también influye en la simulación). La diferencia con el botón fluid de la fila de botones superior es que éste no es un productor de fluido, sino que define un volumen que contiene fluido.
Una vez que se han definido los elementos que van a formar parte de la simulación, se pulsara el botón bake del panel fluid para iniciar el cálculo de la simulación.
En el siguiente video de ejemplo se muestra un ejemplo de uso del simulador de fluidos. Se utiliza el cubo inicial de la escena por defecto de Blender como contenedor de dominio. En
Video: 00:16 se fuerza a que se muestre en modo alambre (para no molestar en el modelado del resto de etapas de la escena). A continuación se añade un cubo
Video: 00:23 con el que modelaremos el vaso mediante superficies de subdivisión
Video: 00:43 - 01:30. En
Video: 01:32 se aplican el modificador de subdivisión para que el cómputo de las colisiones del simulador se realicen correctamente. Finalmente se añade otro cubo
Video: 01:38 que servirá como productor de fluido. Inicialmente se establece en este cubo una fuerza en el eje Z del cubo de 0.15 unidades
Video: 02:38, pero se nos olvida activar el botón de local cords enable, por lo que al realizar la simulación posteriormente el fluido sale hacía arriba (respecto del eje Z global). Pulsamos control z para deshacer las modificaciones
Video: 02:57 y realizamos de nuevo la misma operación, ahora activando el botón del coordenadas locales
Video: 03:16. Finalmente activamos el botón de bake y calculamos la simulación
Video: 03:30.
×
 Lo primero
+ Preguntar sobre
Lo primero
+ Preguntar sobre
Configuración
Mi perfil
Contacto
Mail al administrador
- Animación y Rigging
- Errores de programa
- Hardware
- Iluminación
- Impresoras 3D
- Modelado
- Partículas y Dinámicas
- Plugins
- Postproducción
- Render y Cámaras
- Script
- Texturas y Materiales
- Videojuegos
Configuración
Mi perfil
Contacto
Mail al administrador













 Citar
Citar
